



Ikarus Observatory is named after a Greek mythology hero: Icarus (Ikarus hereafter). Ikarus is the son of the master craftsman Daedalus, the creator of the Labyrinth. Often depicted in art, Ikarus and his father attempt to escape from Crete by means of wings that his father constructed from feathers and wax. Ikarus's father warns him first of complacency and then of hubris, asking that he fly neither too low nor too high, so the sea's dampness would not clog his wings or the sun's heat melt them. Icarus ignored his father's instructions not to fly too close to the sun, whereupon the wax in his wings melted and he fell into the sea.
Ikarus Observatory (29.11° N, 48.10° E) is located in AlSabahiya, Kuwait. AlSabahiya city is located 32 km south of Kuwait city, and is part of the Ahmadi Governorate. With a population of approximately 80,000, it is a heavily populated residential area with high levels of light pollution and congestion.

The site weather is typical of a desert climate with short cold winters and hot long summers. Summers (April to October) are hot and humid with very little rain. Winters (November to March) are cool with limited rain. Springs are cool and pleasant. Summer starts in Kuwait from the month of April and continues till October. The summer months are extremely hot and dry and while the normal day temperature is 33°C, it rises up to 51°C (124°F), during the months of June, July and August, with very low humidity. The months of April and October are less harsh with temperatures slowly dropping below the 40s to lower 30s. Another feature of Kuwait’s climate is that it never rains during the summer months and from June to September are regarded as the driest months.
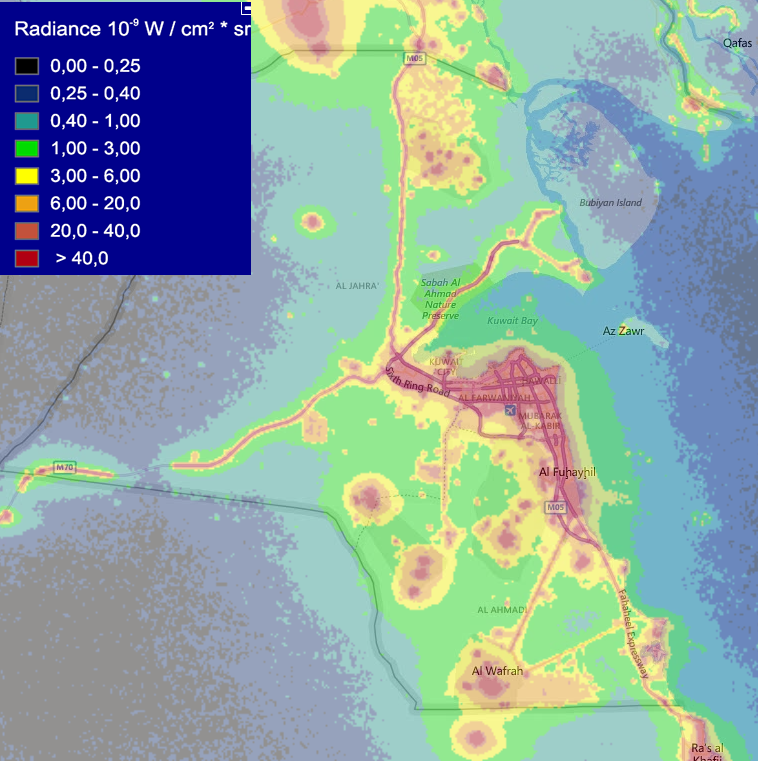
Kuwait gets about 300 clear nights per year making it a suitable location for observation. However, this is heavily negated by the severe light pollution, occasional dusty weather, and sub-par seeing. To work around the site limitations, Ikarus Observatory only utilizes narrow band filters for imaging purposes. Due to high sky glow, subs durations are typically between 1-5 minutes. Post processing of images is performed to minimize the background noise and other artifacts in order to boost the signal to noise ratio (SNR)
The observatory equipment are as following:
-
Ikarus Roll off Roof:
Ikarus Roll off roof is a custom built 4.5x5 meter insulated roof on a 4.3x9m steel tracks with 4 wheels on each track. The roof consists of a 7 cm insulated sandwich panel to protect against the elements and excessive summer heat. A modified 0.5 HP 240v winch motor is meshed with a 4.5m gear rack to unpark and park the roof.
- Optical Telescope Assembly (OTA):

The OTA is an Orion EON 120mm apochromatic refractor. The EON 120ED's optics consist of a fully multi-coated, air-spaced 120mm objective doublet lens of exceptional quality, containing one element of FPL-53 extra-low dispersion "ED" optical glass.
| Optical Design | Refractor |
| Optical Diameter | 120mm |
| Focal Length | 900mm |
| Focal Ratio | 7.9 |
| Optics | Air-spaced doublet |
| Glass Material | Extra low dispersion FPL-53 |
| Resolving Power | 0.97 arcsec |
| Optical Quality | Diffraction limited |
-
Orion HDX110 (EQ8) Mount.

The HDX110 EQ-G Mount head features 8.6" diameter (219.5mm) Right Ascension (RA) and Declination (Dec) worm wheels with 435 gear teeth for exceptional precision. The substantial 55mm RA and Dec shaft diameter further enhances stability. This mighty mount is equipped with an autoguider port, buttery smooth latitude jackscrew with a 10°-65° range, handy azimuth adjustment knobs (+/- 10° range from center), SNAP port (for DSLR shutter control), and more. This heavy-duty head-turner of a telescope mount features robust, state-of-the-art electronics, including high-resolution, micro-stepped stepper motors and patented dual-encoder technology that allows both automated GoTo operation and manual slewing, without losing the GoTo alignment. In fact, once a successful alignment has been completed, you can loosen the RA and DEC clutches and manually reposition the mount and attached telescope while still maintaining the GoTo accuracy once the clutches are relocked.
Weight Rating 50 kg Tracking Rates Lunar, Solar, and Sidereal Motor Speeds 3.4°/sec(800x), 600x, 500x, 400x, 64x, 32x, 16x, 8x, 2x, 1.75x, 1.5x, 1.25x Motor Type Microstep driven stepper motors Bearing Material Sealed ball bearings

-
QSI 583wsg CCD with 5-position internal filter wheel.
The QSI 583 camera employs an 8.3 megapixel Kodak Enhanced Response full-frame CCD image sensor with microlens technology. The high quantum efficiency, wide dynamic range and low noise performance make the 532 ideally suited to a broad range of demanding astronomical, scientific and industrial imaging applications.
The KAF-8300 sensor has a photoactive array of 3326W x 2504H pixels. It has excellent quantum efficiency between 350nm and 1000nm with significant enhancement at the blue end of the spectrum. Low dark current and high pixel charge capacity result in a dynamic range exceeding 70db. The sensor employs a true two-phase charge transfer technology with a transparent gate that significantly increases optical response compared to traditional front illuminated full frame sensors. Micro lenses cover the surface of the CCD and focus the light through the transparent gate to further increase optical response.
- MoonLite NightCrawler Focuser & Rotator.
-
Lodestar x2 autoguider.
The Lodestar X2 is an upgraded version of the very popular Lodestar autoguider. The original Lodestar uses the ICX429 Exview chip from Sony and offers excellent sensitivity. However, Sony have now upgraded the ICX429 to the ICX829, with considerably improved QE and read noise. This new 'Exview 2' chip approximately doubles the Lodestar sensitivity and adds nearly a full star magnitude to the minimum guide star brightness.
- Optec FlipFlat for remotely controlled dust cover and flat field source. It is robotic lenscap and flat field illumination source for small to medium size refractors.
- SQM LE night sky brightness meter.
- Davis Instrument Vantage Vue weather station.

After a couple of years of doing Astrophotography from the roof of my house, I grew tired from the constant packing and unpacking of my astro gear. It takes about half an hour to assemble all the equipment, and about another half an hour to disassemble and store back into their respective boxes. While the occasional trip to AlSalmy desert, about an hour drive from where I live, is worthwhile with its spectacular dark sky, nothing beats of the convenience of a home observatory.
Moreover, since I am the developer of Ekos, and the primary developer of INDI, I frequently need to test changes in the INDI drivers and Ekos framework or to try out new astro gear, and this required even more dedicated time in setting the equipment for testing purposes. Therefore, the idea of a permanent observatory began to constantly invade my mind. However, due to the complexity of such a task and the financial budget required to complete it, I put it on hold for the last couple of years.
A robotic telescope is an astronomical telescope and detector system that makes observations without the intervention of a human. In astronomical disciplines, a telescope qualifies as robotic if it makes those observations without being operated by a human, even if a human has to initiate the observations at the beginning of the night, or end them in the morning.
A robotic telescope is distinct from a remote telescope, though an instrument can be both robotic and remote. Robotic telescopes are complex systems that typically incorporate a number of subsystems. These subsystems include devices that provide telescope pointing capability, operation of the detector (typically a CCD camera), control of the dome or telescope enclosure, control over the telescope's focuser, detection of weather conditions, and other capabilities.
Frequently these varying subsystems are presided over by a master control system, which is almost always a software component. In Ikarus Observatory, Ekos Scheduler serves as the master control system. One observations are scheduled, the Ekos Scheduler can be started in completely autonomus mode.
Robotic telescopes operate under closed loop or open loop principles. In an open loop system, a robotic telescope system points itself and collects its data without inspecting the results of its operations to ensure it is operating properly. An open loop telescope is sometimes said to be operating on faith, in that if something goes wrong, there is no way for the control system to detect it and compensate. A closed loop system has the capability to evaluate its operations through redundant inputs to detect errors. A common such input would be position encoders on the telescope's axes of motion, or the capability of evaluating the system's images to ensure it was pointed at the correct field of view when they were exposed. Most robotic telescopes are small telescopes. While large observatory instruments may be highly automated, few are operated without attendants.
 Welcome to Ikarus Observatory Official Website!
Welcome to Ikarus Observatory Official Website!
I have always been passionate about Astronomy since I was a child. I remember my grandmother gave my sister and I some allowance money, and I used it to buy my first ever astronomy book instead of candy: it was an Arabic book about the solar system and it was quite thrilling to flip through the illustrated pages over and over again. What terrified me though was an image of a frozen earth in the distant future after our sun dies, and even though the description clearly stated this won't happen for a few billion years, it still scared me out right. But what really peaked my interest in Astronomy a decade later (1997) was Carl Sagan's Contact. After watching the movie, I read the book, and I felt that this movie was the most romantic film I have ever seen as the romance is science is truely unparalleled.
When I was doing my degree in Computer Engineering at the University of Kansas (2000-2004), I decided to minor in Astronomy in my sophomore year. More importantly, this is where I first got involved in Linux and Open Source software, a step that have shaped my life ever since. In 2001, I started submitting trivial patches to KStars until later I became a full time developer, and currently I am the maintainer of KStars for the last couple of years. KStars is a desktop planetarium with many features suitable for beginner and advanced users. During the first two years in Kansas, my mountain bike was my primary mean of transportation and it remained so until I aquired my first telescope: A Meade LX-90. Since I needed to escape the city light pollution to darker sites, I decided to buy the most expensnve telescope acceessory: a car! With my car, I was able to haul my telescope and mount to nearby dark skies and observe the wonders in the heavens.
In 2003, I started to develop a library to control Meade telescopes from KStars and I developed a preliminary package called KTelescope that implemented most of the LX200 command set. Elwood Downey, the author of the venerable Xephem, approached me and suggested I utilize his newly incepted INDI protocol. Since then, I was part of the INDI project working with Elwood and a growing team of volunteers to improve it and expand its capabilities. Since 2005, I lead the development of INDI Library with the aid of numerous volunteer world wide. I am responsible for the core development of INDI library, INDI Development manual, INDI website, articles, tutorials, and distribution of INDI via source and binary formats. Over the last decade, I developed many drivers including LX200, Celestron, Astrophysics, FLI, SBIG, QSI, GPhoto, Apogee, and V4L2 drivers in addition to several filter wheels, focusers, and auxiliary drivers.
I am also an active member of the Kuwait Science Club Department of Astronomy and Space Sciences, and constructed Kuwait National Radio Observatory, a 5 meter educational radio dish designed to detect and map the distribution of hydrogen clouds in the Milky Way and to measure rotational velocity curves as a function of distance from the galactic center. Furthermore, I worked on AlUjari Observatory automation from the ground up using KStars and INDI. The observatory old control system was removed and replaced with modern solid state AC and DC drives to control the dome and fork-mounted twin-telescopes motors which were outfitted with absolute multi-turn encoders to achieve high GOTO accuracy and precision.
While INDI is monumental in driving astronomical instrumentation, a higher level layer to manage the complete observatory in addition to perform common astrophotography routines was missing in Linux. Hence, I started the development of Ekos in 2013. Since then Ekos has grown to become the swiss knife of astrophotogrpahy and observatory automation. I am still actively maintaining INDI, Ekos, and KStars which now power a number of observatories world wide and enjoys an active avid community of developers and volunteers in all corners of the world.
My latest project is Ikarus Observatory, my very own home observatory built on the same technologies I worked very hard on for the last decade. In addition to capturing amazing pictures of the heavens, I plan to utilize the observatory to perform science-oriented objectives in the near future. Furthermore, robotic control of the observatory shall be made available to the public via a simple web interface.
Besides Astronomy and Programming, I am a hardcore PC gamer, avid reader of sci-fi and fantasy fiction, enjoy occasional hiking and biking, and spending a lot time with my two lovely companions: Juli und Tommy!

Ikarus Observatory is located in AlSabahiya, Kuwait. Robotic control is publicly available and free of charge